![]() 煤炭
煤炭
![]() 煤炭
煤炭

矿山是典型的复杂作业现场。道路会随着采场推进不断变化,装载区和排土区每天都在更新,车辆、挖机、辅助设备和作业人员处在同一个生产系统中。无人驾驶矿卡要长期稳定运行,必须具备更强的环境理解能力、现场适应能力和任务协同能力。
通用智驾大模型,正是面向这一问题而来。它可以理解为无人矿卡的“智能大脑”:通过多模态传感器感知矿区环境,通过4D时空融合模型理解道路、车辆、障碍物、装载区和排土区变化,通过规控PNP模型进行类人驾驶决策,并通过真实数据和虚拟训练持续进化。
更聪明:从“按规则行驶”到“理解场景后行动”
过去,矿山无人驾驶更多解决“车能不能自己开”的问题。大模型带来的变化,是让车辆从“按规则行驶”走向“理解场景后再行动”。
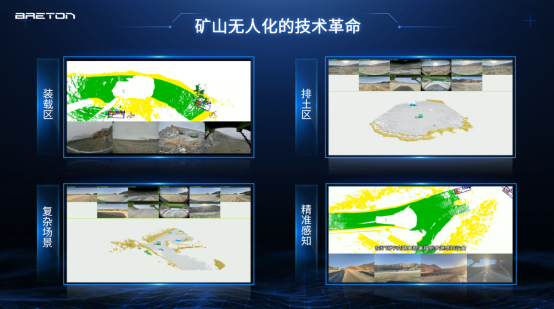
在装载区,无人矿卡需要判断挖机位置、装载节奏和安全停车区域;在排土区,需要识别排土边界、卸载区域和周边风险;在复杂道路中,需要判断会车空间、坡度变化、临时障碍、辅助车辆和人员风险。车辆越理解矿区,行驶就越稳定,作业就越接近真实生产需要。
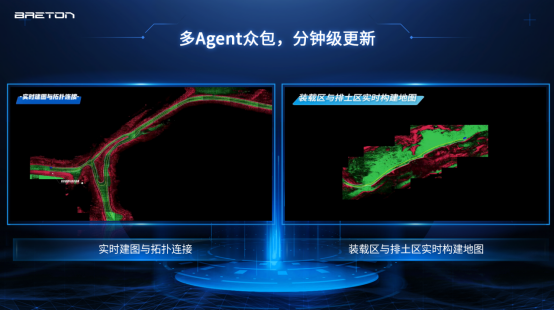
大模型的价值,还体现在持续学习能力上。无人矿卡在矿区运行过程中,会不断产生真实场景数据。系统可以围绕困难样本、长尾场景、低置信度场景和异常场景进行挖掘,再通过数据治理、自动标注、模型训练、仿真验证和实车测试推动模型进化。矿山越复杂,模型越需要成长;运行数据越充分,无人驾驶能力越能贴近现场。

为了提升模型训练效率,博雷顿智驾还通过世界模型和虚拟训练体系,为无人矿卡建立“虚拟驾校”。极端天气、夜间低照度、扬尘遮挡、临时障碍、道路突然变化、人员进入作业区等场景,在真实矿山中很难大量采集,也不适合反复试错。虚拟矿山可以生成大量复杂场景和危险场景,让模型提前训练、反复验证,再将训练结果反哺实车运行。
这意味着,无人驾驶不再只是一次性的自动行驶能力,而是在长期运营中不断积累经验、优化判断、提升能力。矿卡不只是“无人”,更要“会判断、会适应、会成长”。
更高效:从“单车自动驾驶”到“车队协同运营”
大模型带来的效率提升,不只体现在单台车辆上。矿山运输的效率取决于整个系统:哪台车去装载,走哪条路,什么时候排土,什么时候补能,如何避开拥堵,如何减少等待,都会影响最终产能。
博雷顿AI大模型调度系统面向矿区群体智能,将单台车的智能进一步扩展到车队协同和全局调度。通过运力全局调度、路径最优计算、任务动态分配和矿山变化实时推演,系统可以让无人矿卡车队在复杂生产环境中更高效协同。
在无人驾驶落地初期,博雷顿智驾系统可实现相当于人工驾驶95%—100%的作业效率。随着大模型持续迭代,车辆对矿区道路、装载节奏、排土区域、会车避让和补能调度的理解能力不断提升,系统效率将进一步向超过人工驾驶水平演进。
与人工驾驶相比,无人驾驶系统还具备更稳定的连续作业能力。矿山运输往往是高频、重载、长时间运行场景,博雷顿智驾系统可支撑7×24小时连续运营,在减少换班、等待和人为状态波动的同时,让车辆运行节奏更加稳定。随着系统成熟,单日人工接管和干预次数可控制在5次以下,实际节约人工可达到90%以上。

对于矿山客户来说,无人驾驶的价值不只在于减少驾驶环节,更在于提升运输组织效率。车辆、道路、装载点、排土点和补能资源能够被更合理地调度,等待时间有望减少,运输节奏更加顺畅,整体运营效率也更容易被持续优化。
从这个角度看,博雷顿无人驾驶通用智驾大模型的发布,标志着矿山无人驾驶正在从“单车自动化”进入“系统智能化”阶段。它让矿卡更聪明,让车队更协同,也让矿山运输系统具备更大的效率提升空间。

天生无人,不止无人。博雷顿智驾正在以大模型为核心,推动无人矿卡从会行驶走向会作业,推动矿山运输从车辆自动驾驶走向系统智能运营。
 京公网安备 11010802020613号
京公网安备 11010802020613号